Japan's space agency solved one of the harder problems in small-scale space exploration, and it did it with help from a toy company.
According to Phys.org, the Japanese Aerospace Exploration Agency teamed up with toy manufacturer Tomy to co-design a tiny lunar rover called LEV-2. The rover launched aboard the Japanese Smart Lander for Investigating Moon, known as SLIM, which touched down on the lunar surface in 2024.
The design challenge was specific. Tiny rovers are attractive for space missions because they are compact and lightweight, making them easy to carry as secondary payloads. But navigating through powdery lunar soil is difficult for small robots. Wheels that work on solid ground can sink or spin out in loose regolith. The collaboration between JAXA and Tomy produced a rover that addresses that problem directly.
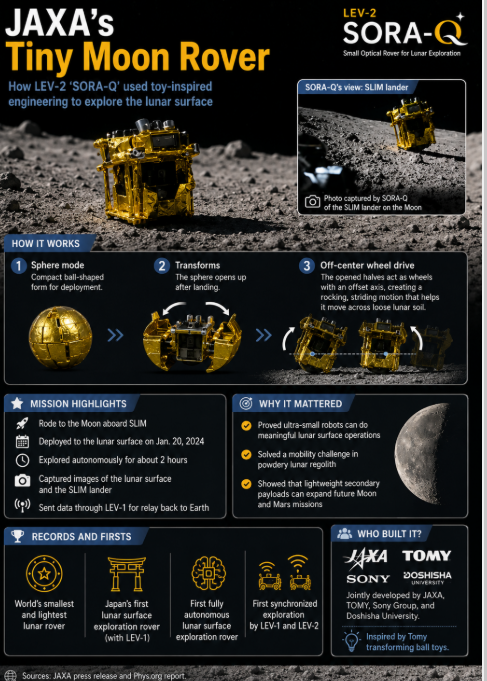
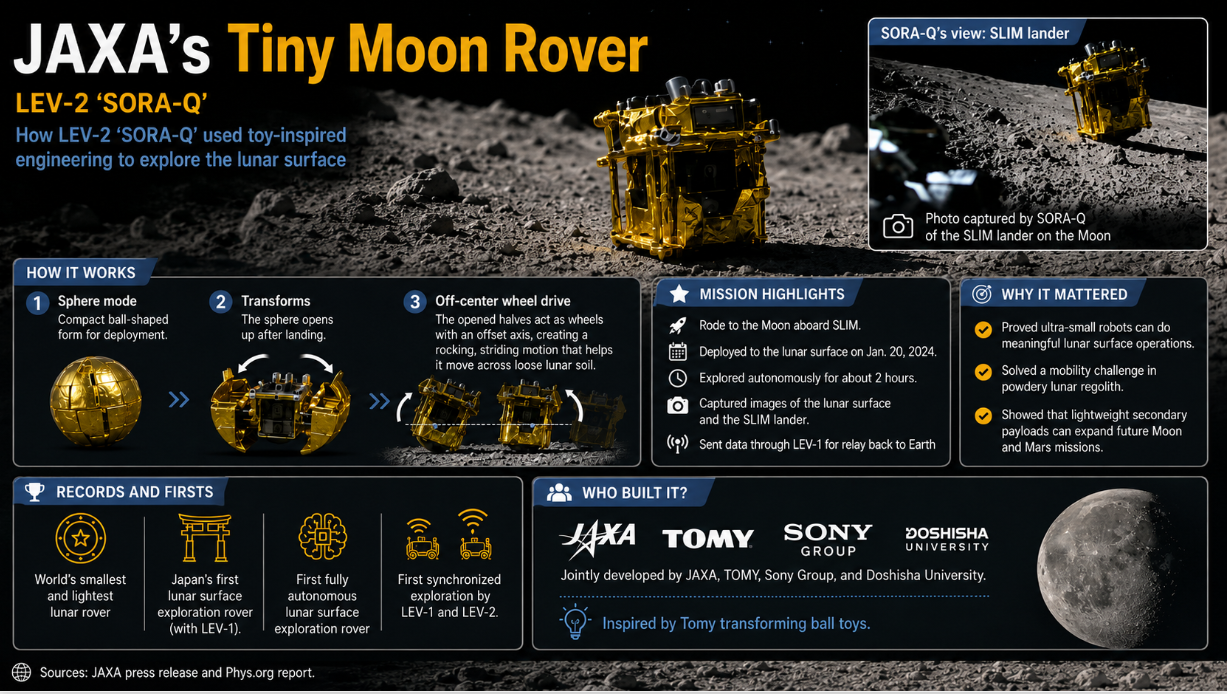
The inspiration came from Tomy's line of transforming ball toys. LEV-2 arrives on the surface in a sphere configuration, then opens up and extends wheels that rotate on an off-center axis. That offset gives the rover a rocking, striding motion that lets it move across powdery terrain without getting stuck. The design is compact enough to be practical as a space payload while still functional enough to operate independently on the surface.
Once deployed, LEV-2 explored the landing site autonomously for two hours. It captured high-resolution images of both the lunar surface and the SLIM lander itself. To conserve power, the rover transmitted its collected data and images to SLIM, which then relayed everything back to JAXA on Earth.
The mission demonstrated something researchers wanted to confirm: that extremely small micro-robots can perform meaningful surface operations on other solar system bodies. As space agencies plan future missions to the moon, Mars and beyond, the ability to deploy cheap, lightweight, autonomous scouts alongside larger landers could significantly expand what those missions are able to study.
The JAXA paper reporting on the engineering behind LEV-2 was among this week's notable citations in science, published June 13, 2026. The rover's performance on the moon adds to a growing body of evidence that unconventional engineering approaches, including ones borrowed from toy design, can produce real scientific results in extreme environments.